Desde siempre nos han gustado los robots en PcDeMaNo y cuando se podía asistir a eventos relacionados con los mismos , éramos los primeros en asistir a los mismos. Todavía recuerdo uno de los últimos, la 4ª Jornada Robótica organizada por GMV allá por el año 2014, Dentro de sus demostraciones «intentaron» simular la recogida de una piedra marciana. El problema fue que, en aquél momento, no estaba bien ajustado el apriete de la pinza utilizada ya que lo único que se consiguió fue pulverizar la roca 
Una limitación que la robótica viene arrastrando desde siempre es la dificultad para coger debidamente objetos blandos y con otras consistencias pero que son frágiles.
Sujetarlos demasiado flojo puede hacer que se caigan y se dañen. Sujetarlos demasiado fuerte puede también dañarlos.
Al manipular objetos de esta clase, es también importante escoger en cuántos puntos se aplicará la fuerza y cuáles serán esos puntos.
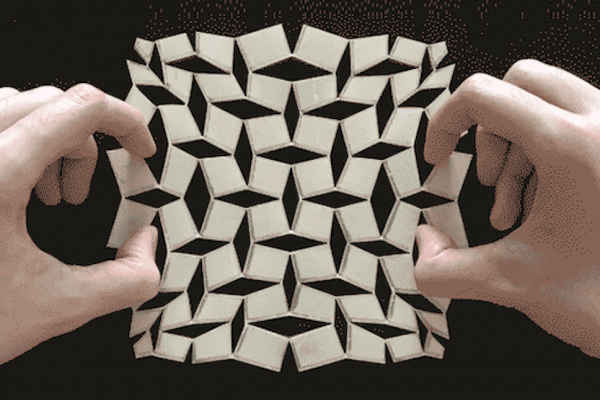
Especialistas en ingeniería mecánica de la Universidad de Boston han ideado una manera imaginativa de aprovechar el kirigami, la técnica artística tradicional de la cultura japonesa, para dotar a pinzas y manos robóticas de una delicadeza y amplitud de agarre idóneas para que puedan coger sin problemas objetos como los descritos.
El kirigami, así como el origami (o papiroflexia), son artes que han servido tradicionalmente para confeccionar complejas figuras de papel sin más acciones que las de plegarlo o recortarlo. El origami ha vivido en años recientes un renacimiento en el marco de las nuevas tecnologías y ahora le está sucediendo lo mismo al kirigami.
Utilizando la técnica del kirigami, los investigadores han desarrollado pinzas tan pequeñas que pueden recoger un solo grano de arena, y pinzas lo bastante grandes como para coger una botella de agua. De esa forma00 esperan que esta investigación suponga una importante contribución al emergente campo de la robótica blanda.
 778
778