
He de reconocer que últimamente casi ya no uso GPS’s basados en SirfIII para mi uso “personal”, ya que al no disponer de un modelo con un dataloger en condiciones, me resulta más cómodo llevar mis Qstarz que, cómo ya he explicado en varias ocasiones, me permiten por un lado disponer de un GPS estándar Bluetooth, y por otro, disponer de un dataloger para guardar mi recorrido y no tener que usar/gastar las baterías de la PDA para registrarlo, con la ventaja añadida de que posteriormente podré descargar dicho tracklog desde la propia PDA en caso de necesidad.
Cuando me plantearon la cesión de un nuevo equipo basado en MTK (como los Qstarz), también con dataloger y proviniendo de la casa que originalmente los sacó al mercado (Transystem) para revisarlo, no dudé un ápice en decir que sí, más si cabe cuando muchos saben la pasión que tengo yo por todos estos cacharrines…
Tras diversas dificultades en el “transporte y entrega” de este producto (que estuvo más de una semana almacenado en las entrañas de un armario del edificio donde trabajo por error), pude finalmente llevarme el paquete a casa y comprobar su contenido…
CONTENIDO DE LA CAJA
La caja, de cuidado aspecto y tacto suave, nos permite visualizar desde el primer momento la estética plana del GPS.
Tal y como nos tienen acostumbrados los distribuidores de GPS’s basados en MTK, el contenido del paquete es muy completo y muy similar al de otros aparatos, incluyendo algún detalle muy interesante, como en este caso, una base de “goma adherente”, que me recuerda a esas “arañitas” pegajosas que se tiraban a las ventanas e iban descendiendo por ellas. Esta base te permite adherir el GPS al salpicadero de tu vehículo y que éste no salga disparado por las curvas. Es curioso observar que en el manual del propio aparato, donde te explican el significado de dicha base de goma (por cierto, de un color azul muy cuco), aparece una foto del GPS adherido a dicha base pero EN POSICIÓN VERTICAL, fijado al alféizar de una puerta…

Así, por tanto, el contenido completo del paquete está compuesto del propio GPS, una batería para el mismo de 750mAh, al cual la doy una autonomía cercana a las 20h.~22h. (pese que en la propia caja y en su publicidad se curan en salud y la fijan en 18h.), un cargador de mechero para el coche, un cargador de pared, un cable USB-MiniUSB para la descarga de datos y la carga del GPS desde un PC, el manual de usuario (en perfecto inglés ?), una cinta/llavero para enganchar el GPS a donde quieras, un miniCD de drivers y utilidades, con el software para descargar el tracklog del aparato y hacer fototaggin, y la famosa base “pegajosa” de un azul cielo muy mono…
GPS
Una de las cosas que llaman la atención a primera vista, es la estética plana del aparato. Visto desde arriba, es más grande que los demás GPS’s BT de los que dispongo, sobre todo porque es muy alargado (9’5cm Frente a los 7cm del Qstarz, por ejemplo), sin embargo su grosor es de tan sólo 1cm, frente a los 2cm~2’5cm del resto de aparatos, lo que resulta especialmente cómodo para llevarlo en el bolso posterior del pantalón, o incluso en el bolso de la camisa. También es algo más ligero que sus competidores, aunque la diferencia de peso no es demasiado llamativa, ya que los otros tampoco es que pesen demasiado.


Centrándonos ahora en el funcionamiento del aparato, una de las cosas que nos ha sorprendido es el interruptor de encendido. Ya no se trata de un interruptor desplazable, sino que es un botón “soft”. El funcionamiento sería el siguiente: Si pulsamos y mantenemos, el GPS se enciende. Es necesario mantenerlo unos 3 segundos para que este encienda. Por defecto se inicia en modo BT, con el datalogger desactivado. Si damos una nueva y rápida pulsación, este pasa a modo “logger”, manteniendo la habilidad de seguir conectado vía BT. Si volvemos a pulsar, este desactiva el log y pasa a modo sólo “navegación”, y así sucesivamente. Para apagarlo, es necesario mantener el botón pulsado al menos 3 segundos. Me preocupa que al llevar el GPS en la mochila o en el bolsillo, una pulsación del botón sin querer, te desactive el log y pierdas la grabación del recorrido. Bien es cierto que no veo fácil una pulsación accidental del mismo, por lo que esta posibilidad es bastante remota, aunque existe.
Otra cosa que me llama la atención y que no me agrada, es que han retirado el botón, y por tanto la posibilidad, de guardar “waypoints”, tal y cómo se podía hacer en los modelos “gorditos” de las versiones anteriores.
Respecto a las luces de funcionamiento, ahora disponemos de cuatro leds. Por un lado, tenemos el led de batería. Este nos indicará con un led verde si está en carga o cargado cuando lo tenemos conectado a través del mini-usb, y mediante un led rojo cuando la carga está acabándose cuando lo tenemos conectado sólo por batería. Junto a él está el led del bluetooth, que nos indica si estamos conectados con el aparato o si estamos en modo “sólo navegación”. Al lado se encuentra el led de satélites, que nos dirá si está fijada la posición o no, y por último, el led que nos indica si el GPS está en modo dataloger. Un completo conjunto de luces que nos permitirá en todo momento saber cómo se encuentra nuestro aparato, sobre todo ahora que ya no tenemos un botón desplazable que nos permita ver si estamos en modo log o en modo sólo navegación.

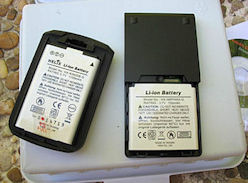
La batería, como hemos comentado antes, es de una capacidad de 750mAh. y es extraíble. Sé que es compatible con una de Nokia, pero no he podido averiguar con qué modelo concreto. No he podido hacer una prueba de duración completa, pero todos los test que he realizado a este aparato las he realizado con sólo una carga de batería, y más o menos calculo que habré estado conectado al GPS unas 15~16h. sin que aún haya podido ver la luz de batería baja en el aparato. Por esto, no sería de extrañar que la batería nos dure unas 20h. con un uso mixto (sólo datalogger y modo navegación con Bluetooth conectado). Sin embargo estos extremos los iremos comentando en el foro.

Respecto al software que incorpora, es el mismo que el de los Qstarz. Personalmente lo considero un mal software, aunque es funcional. Afortunadamente con este aparato también podemos usar programas alternativos, como el maravilloso BT747 del amigo Mario (http://bt747.wiki.sourceforge.net).
A las pruebas me remito:
Bueno, y tras las presentaciones, vamos ahora ya a centrarnos en las pruebas reales de “campo”. Estas son realmente las que a mí más me gustan, y aunque aún tengo pendientes algunas cuantas pruebas más, os voy a presentar a groso modo los resultados de las primeras y las conclusiones a las que se pueden llegar con ellas…
Durante tres jornadas seguidas, y a horas muy similares (hacia las 5 de la tarde en todas ellas), he preparado un vehículo especialmente diseñado para esta ocasión al que he bautizado con el nombre de “carretillo tecnológico”. En mis anteriores pruebas, salía a campo con apenas 5 GPS’s, los cuales me cabían perfectamente en el copete de una mochila. Sin embargo, conforme el número de chiquiñofes fue en aumento, la mochila se quedó corta/muy corta, así que me las tuve que ingeniar para poder llevar todo el aparataje de una forma “equitativa”, en la cual ninguno de los aparatos se viera favorecido por su óptima posición frente a los otros. Así nació este artilugio…

Para esta ocasión, las pruebas fueron realizadas con los siguientes “paratos”:
– De la familia SirfIII:
o SysOnChip SmartBlue
o Royaltek RBT-2210
o Royaltek RBT-2001
– De la familia MTK:
o Qstarz Q818
o Qstarz Q1000 (idéntico la Konet, por ejemplo)
o Qstarz Q1000P
o Y por supuesto el iBlue 821 que estamos revisando
– Otros:
o Trimble Nomad. Este aparato tiene la posibilidad de realizar correcciones diferenciales en postproceso, analizando los datos obtenidos por una base de control (en nuestro caso, usaremos la base VALA1 del Instituto Tecnológico Agrario de Valladolid). Estas correcciones aún no las he podido aplicar a los datos obtenidos para esta revisión, pero las publicaré con la segunda ronda de pruebas del “Carretillo tecnológico” en el segundo reportaje sobre precisión de GPS’s que realizaré para finales de octubre/noviembre.
o TopCon GMS2. Este aparato monofrecuencia, aparte de ser GPS+Glonass, tiene la ventaja de recibir las correcciones diferenciales en tiempo real gracias a una base de referencia. En este caso usaremos una base virtual que nos genera el ITA (VALA0) y la sitúa allí donde estamos realizando las muestras. Estas correcciones las recibimos vía GPRS mediante un teléfono móvil.
Con todos los cacharrines, y puestos en marcha, obtuvimos un montón de tracks con un montón de curiosas observaciones y que pasaremos a detallar
• PRUEBA DEL “CARRETILLO” ( a pié con velocidad constante, visibilidad aceptable/buena)
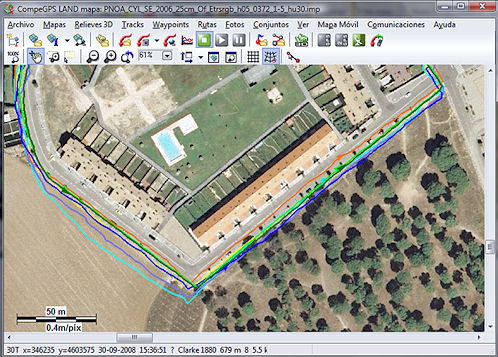
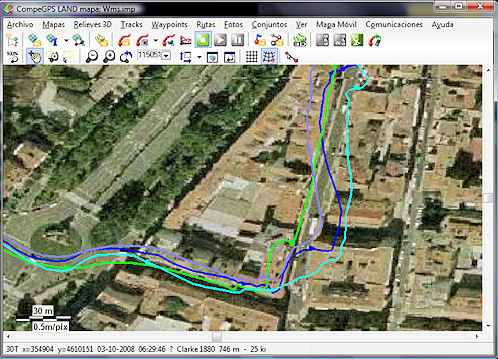
Para facilitar el análisis de los datos, en esta primera prueba hemos usado los tracks de los siguientes GPS’s (y sus respectivos colores). En amarillo veremos el track del TopCom GMS2, en naranja el track del Trimble Nomad SIN CORRECCIÓN DIFERENCIAL que tengo aún pendiente de procesar, pero que por motivos de trabajo aún no lo he podido hacer y que lo haré para la siguiente semana, ya que el programa PathFinder sólo lo tengo en la oficina, en azul celeste (cyan) tenemos el track del GPS que estamos analizando, osea el iblue821, en morado vemos el del Q1000/konet, en azul oscuro el del Q1000Platinum, en verde clarito el del RBT-2001, y en verde oscuro el del RBT-2210. El del 818 y el del SysOn se parecen muy mucho al del Q1000 y al del RBT2201 respectivamente, por lo que por motivos de claridad les he quitado de las capturas de pantalla.
El primer tramo se inicia en una calle relativamente estrecha, rodeado de adosados de dos pisos de altura. En esta captura de pantalla, podemos observar que los tracks más adecuados son los del TopCon GMS2 (prácticamente ajustado al 100% a la realidad), y el del Q1000P, que cada día me convence más
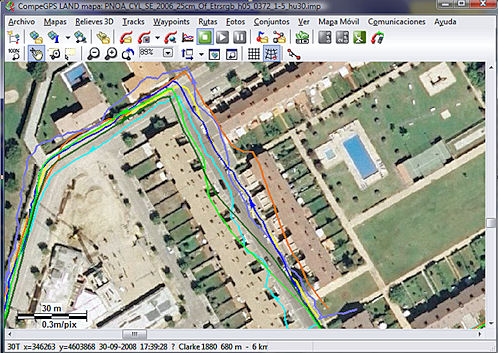
En las primeras observaciones, el track azul clarito (el del iBlue821) no se comprta debidamente, y es el que más se desplaza de la trayectoria real, junto a los basados en SirfIII…
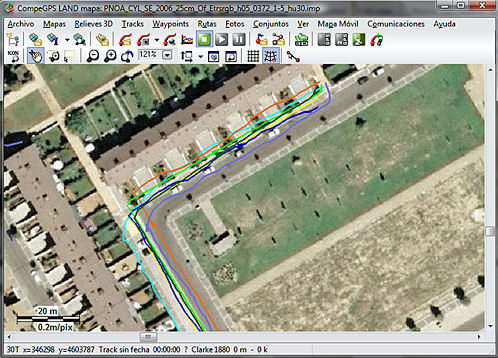
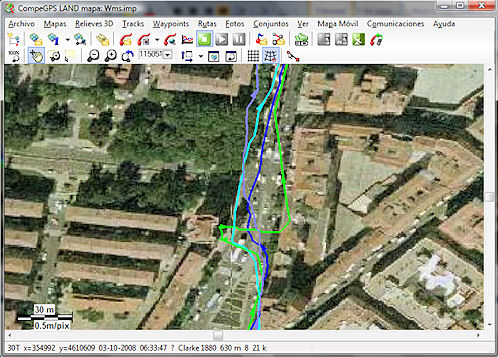
En la segunda parte, ya con una buena visibilidad, las cosas se equiparan muy mucho, y todos muestran una calidad más que aceptable en su trazado. Quizá en esta ocasión el peor parado sea el Q1000/konet, que se nos va en una media de unos 6m., zigzagueando de un lado para otro…
Haicom y Emtac. Aquí simplemente os volvemos a poner los correspondientes al Royaltek 2010 que como os hemos dicho se hicieron en el mismo lugar y a la «misma hora» -aprox- que con el resto de SiRFIII de dicha revisión… y con el iBlue.
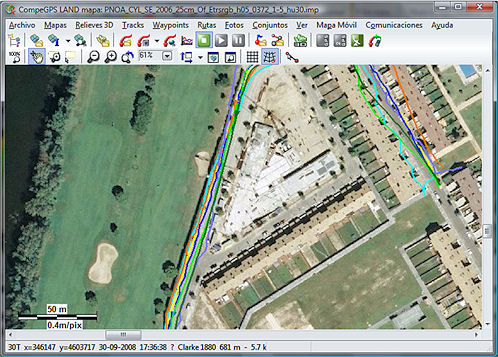
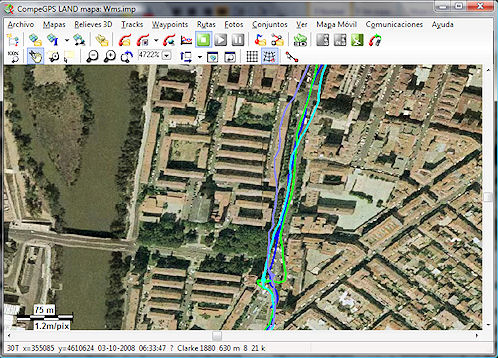
El tercer largo es también muy curioso… Tanto el Q1000 como el iBlue 821 se nos van bastante al noroeste. Seguimos con buena vista hacia el cielo…
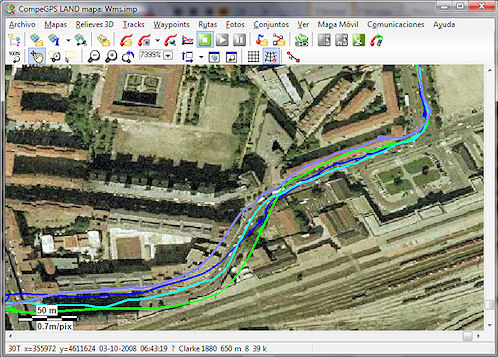
En la prueba del zigzagueo, volvemos a encontrarnos con buenas curiosidades. El GMS2, con corrección diferencial en tiempo real gracias a la estación virtual VALA0 del ITA (www.itacyl.es), nos muestra el camino perfectamente posicionado y con un detalle máximo. Los basados en Sirf (tracks verdes) también lo registran correctamente, aunque un poco desplazados de su posición real. El Nomad también lo registra correctamente, aunque también desplazado de su posición real (insisto, a falta de aplicar la corrección diferencial sobre sus datos). Sin embargo, los basados en MTK (tracks azules) son bastante más inexactos a los rápidos y breves movimientos en nuestros andares. Así la trazada es mucho más redondeada e inexacta.
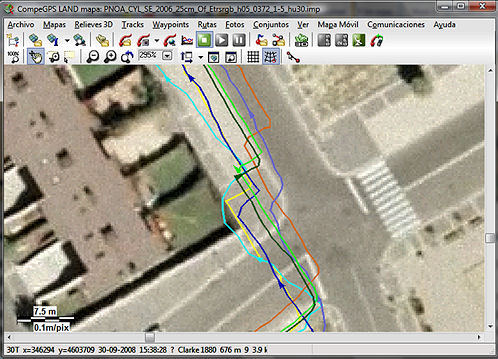
Sin duda, el mejor de los MTK sigue siendo el Q1000P (azul oscuro).
El último largo sigue poniendo de manifiesto el desplazamiento erróneo del track del iBlue 821 hacia el Oeste, aunque cuando cambiamos de rumbo a Este, las cosas mejoran notablemente
¿Qué conclusiones podemos sacar de estas capturas y de lo observado a lo largo de los tres días de pruebas?
El mostrar todas las pruebas sería una misión muy laboriosa y muy larga. Tras analizar personalmente todas las capturas y todos los tracks de mis caminatas con mi inseparable carretillo, os puedo dar unos cuantos puntos claves de estos resultados:
* En referente a la guerra entre chips MTK versus SIRF III, la calidad de los tracks obtenidos en general por los primeros, y sobre todo por el Q1000P, son más que aceptables. En condiciones de recepción difícil, se muestran mucho más estables que los basados en SirfIII, manteniéndonos en una posición mucho más cercana a la realidad.
* En cuanto la calidad de recepción mejora, sin duda el claro vencedor es el chip SirfIII, mostrando no sólo tracks más cercanos con la realidad, sino también mucho más precisos en cambios de rumbo bruscos o breves (ver la captura del zigzag, en la cual hicimos dos cambios de rumbo de 90º que fueron registrados perfectamente por los Sirf, mientras que los MTK se mostraron mucho más “perezosos” en este aspecto, mostrando un recorrido mucho más redondeado y suavizado).
* En cuanto a los perfiles de altura, y aunque no os he mostrado captura alguna ya que resultan muy “planos” y aburridos, en este caso también se muestran mucho más estables los GPS’s basados en chip MTK, mostrando menos “dientes de sierra” en los perfiles, frente a los obtenidos con el chip Sirf.
* Centrándonos en el aparato en revisión, le vemos un pelín “sordo”, aunque muy similar (sino idéntico) al comportamiento de su hermano “natural”, el Q1000/Konet.
Por supuesto todas estas conclusiones son utilizando el aparato a bajas velocidades (ósea, andando). ¿Qué pasará cuando lo usemos a velocidades más típicas de vehículos autopropulsados?… vamos a verlo:
• PRUEBA MOTORIZADA (viaje típico en Autobús)
Evidentemente para estas pruebas no podía ir con mi carretillo, así que lo sustituí por mi típica mochilita. Dentro de ella viajaban el iBlue 821 como era lógico, ya que es el que estamos revisando, mi actualmente inseparable Q1000P, el manido Q1000/Konet, y el mejor de los Sirf que poseo, el RBT-2210.
Puestos en carretera, y en campo abierto, cualquiera de cuatro GPS’s se comportan correctamente:
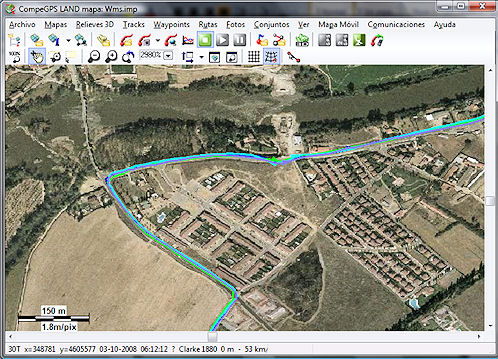
Sin embargo, cuando nos vamos acercando a la ciudad, las cosas se complican un poquito:
Fijaros que mal le sienta al Royaltek (sirf, track verde) la falta de cobertura momentánea:
A los MTK también se les atraganta, pero los movimientos son más suaves, aunque más mantenidos, alargándose el desfase durante unos metros más. Si quitamos un poco de zoom, podemos ver que el peor parado es el Q1000/Konet (track morado), mientras que el Sirf (verde), el Q1000P (azul), y curiósamente el iBlue 821 (cyan, y que es el que estamos revisando) mejoran enseguida, pese a que en las pruebas “andadas” se mostraban muy similares en “capacidades auditivas” el Q1000/Konet y el iBlue 821.
Aquí una captura de una chicane alargada, todos se muestran muy parejos…
El resumen que he podido sacar de mis pruebas “ciudadanas” motorizadas de estos cacharrines es que todos se comportan de forma muy pareja y similar. En cuanto hay falta de cobertura o muchas señales rebotadas, todos se comportan de forma anómala, aunque afortunadamente el software que solemos usar para ciudad/carretera sabe interpretar estos datos de forma correcta y no nos mueve habitualmente de la calle donde nos encontramos.
Los Sirf son mucho más nerviosos, como ya sacamos de conclusión en las pruebas “andadas”, que los MTK en momentos de falta de cobertura, y nos puede fijar a muchos metros de distancia de donde realmente estamos, y de forma instantánea nos puede mover a otro punto totalmente diferente, disparando por tanto las estadísticas de velocidad media y velocidad máxima, mientras que los MTK corrigen su posición de forma más suave y mantenida.
No obstante, cualquiera de los aparatos usados en esta prueba son igual de válidos para ser usados con un software on-road, tipo TomTom, Sygic, TwoNav, etc
• PRUEBA ESTÁTICA (toma de puntos con precisión, manteniendo el GPS estático en una posición)
Esta prueba será realizada durante la tercera semana de octubre, y formará parte, como ya he comentado en este reportaje, de la ampliación del Estudio de precisión sobre GPS’s. No sólo usaremos GPS’s bluetooth, sino que meteremos en el estudio algún GPS de campo tipo Garmin, estaciones monofrecuencia profesionales, y quizá una estación bifrecuencia. Evidentemente en el estudio estará este nuevo GPS, el iBlue 821, y veremos cómo se comporta.
PUNTUACIÓN: 9.8 (Tan alta como la del Qstarz 1000P)
Nota
| Gracias a Edu de Gpsparatodos por habernos enviado este GPS para su revisión!. |
CpAsoft, aún tratando de coordinar todas las pruebas que quiere realizar para la ampliación de su estudio sobre la precisión del los GPS’s…
 1040
1040